A helyzetvonal
Azt tudjuk, hogy a nagy dolgok is egyszerű alapelveken nyugszanak. Így van ez a navigációban is. Bármelyik navigációs eljárást nézzük is, minden esetben azt találjuk, hogy a hajó – ismeretlen – földrajzi helyzetét úgy tudjuk ismertté tenni, ha több (legalább kettő) ismert helyzetű céltárgyhoz viszonyítjuk. Ehhez nem kell mást tennünk, mint ismernünk kell a kiválasztott céltárgyak földrajzi vagy térbeli helyét és mérésekkel meghatározni a hozzájuk való viszonyunkat.
A méréseink minden esetben két alap mennyiség meghatározására vezethetők vissza: távolság- és iránymérésre. Mindkét esetben a mérések eredményeképpen egy izovonalat kapunk: a vonal azon pontok összessége, amelyek azonos értékeket képviselnek a mérés időpontjában. A távolság mérése esetén az izovonal egy görbe, iránymérés esetén egy egyenes lesz. Ezt az izovonalat nevezzük helyzetvonalnak. Az izovonal egy darabja, kis szakasza, íve vagy az ívhez húzott érintője a helyzetvonal (position line, PL, vagy line of position, LOP).
Nézzük meg röviden, hogy az egyes eljárások során milyen helyzetvonalakat alkalmazunk.
PART MENTI NAVIGÁCIÓ
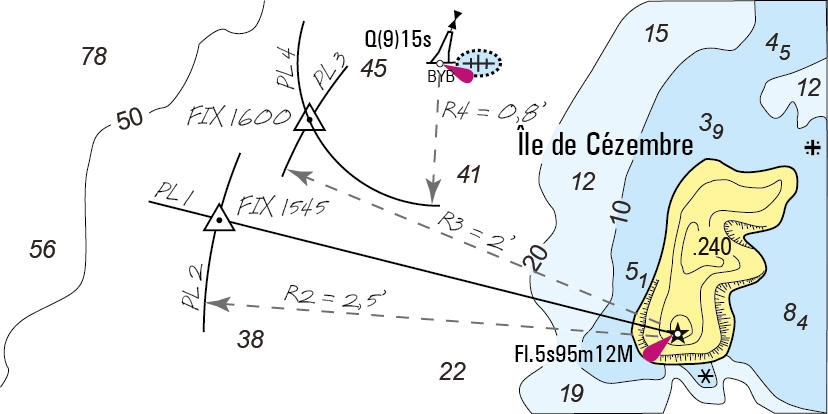
A part mentén az ismert helyzetű céltárgyak sokaságából válogathatunk: világítótorony, bója, hegyfok, kis sziget… ezek földrajzi pozícióját a térképről ismerjük. Legegyszerűbb eljárás a céltárgy iránylatának mérése kézi tájolóval. A helyzetvonal egy egyenes szakasz lesz, amely azon pontok összességét tartalmazza, amelyekből az adott céltárgy adott pillanatban ugyanabból az irányból látható a hajónkról. Ha meg tudjuk mérni a céltárgy távolságát is – például egy erre alkalmas skálával ellátott távcső segítségével –, akkor a helyzetvonalunk egy körív lesz, amely azon pontok összességét tartalmazza, amelyek adott céltárgytól adott pillanatban azonos távolságra vannak a céltárgytól.
Mivel a hajónk ezeknek a helyzetvonalaknak bármely pontján lehet, ezért szükséges, hogy legalább két – de ha lehet, több – céltárgyat mérjünk, vagy egyet többféleképpen, vagy többször. A mérések helyzetvonalai elvileg egyetlen pontban metszik egymást: ez lesz a hajónk pozíciója az adott időpillanatban, ez lesz a FIX pontunk.
Ezekről az eljárásokról mesél a tegnap ismét megjelent Jachtnavigátor I. nyolcadik fejezete.
CSILLAGÁSZATI NAVIGÁCIÓ
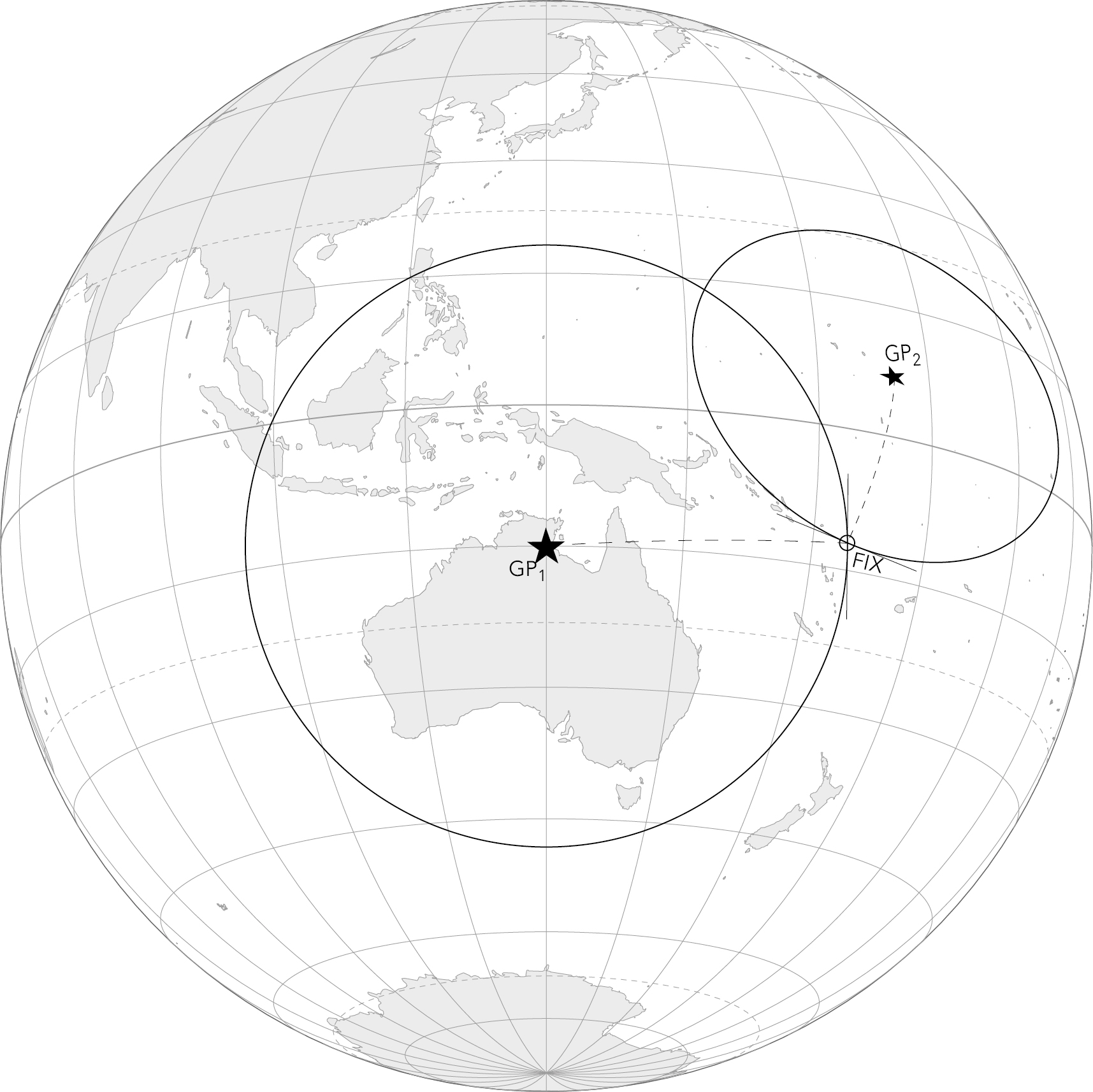
Az óceáni hajózás során is ugyanezt az eljárást követjük, azonban nem lévén parti céltárgyak, az égitesteket használjuk, mint ismert térbeli helyzetű céltárgyakat. Mivel az égitestek – Nap, Hold, bolygók és állócsillagok – látszólag égi pályáját és mozgásukat táblázatok írják le, az égitestek horizont feletti szögmagasságának mérésével azt szeretnénk megtudni, hogy az égitest földfelszíni talppontjától (GP) – attól a ponttól, amelyben az égitest éppen Zenitben látszik – mekkora távolságban vagyunk. Ehhez a távolsághoz egy (az egyszerűség kedvéért körívnek tekintett) izovonal, helyzetgörbe tartozik. Ha több égitestet mérünk gyors egymásutánban, a körívek metszéspontjában leszünk. A probléma viszont ebben az esetben az, hogy a körívek sugara igen nagy, amit nem tudunk a térképre rajzolni ahhoz hasonlóan, ahogy azt a part mentén tettük. Ezért más megoldáshoz folyamodunk, de az alapelv itt is az, hogy a mérés és számítások végeredményeképpen kapott görbék, illetve az ezekhez húzott érintők lesznek a térképre rajzolható helyzetvonalaink, amelyek metszéspontja adja a hajó FIX pozícióját.
Az eljárás nem egyszerű (de nem is ördöngősség), erről mesél a Jachtnavigátor II. 3. rész 7. fejezete.
RÁDIÓ-IRÁNYMÉRÉS
A távoli parti rádióadóktól érkező rádióadás iránylatát is meg tudjuk mérni. Több adó méréséből származó helyzetvonalak metszéspontja adja a FIX pontot.
HIPERBOLA NAVIGÁCIÓ
Bár ma már a klasszikus hiperbola-navigációt nem alkalmazzuk, komoly műszaki fejlődést jelentett a XX. században az eljárás, amelyre több elektronavigációs rendszer is kiépült.
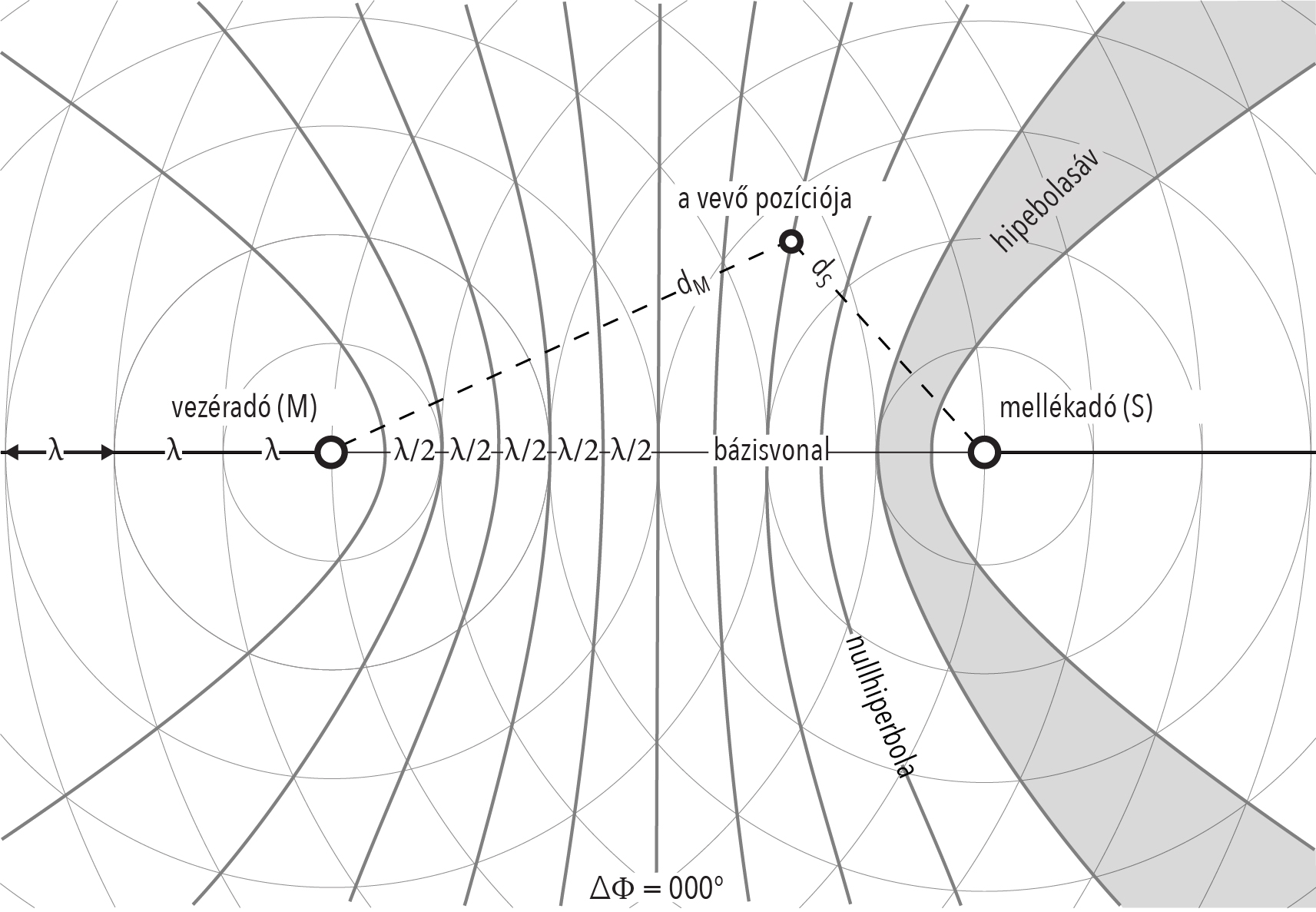
A hajó rádióvevője azonosított, ismert helyzetű rádióadó állomások rádiójeleinek vételével, távolságméréssel állapította meg a hajó pozícióját. A helymeghatározáshoz legalább két mérés volt szükséges, minimum három adó közreműködésével. A közvetlen távolságmérés problematikus feladat volt, ezért a vevő és két adó közötti távolságok különbségét használták fel az eljárás során, mivel a távolságkülönbség egyszerűbben mérhető. Az adópárok közül az egyik adóállomás mindkét mérésnél ugyanaz lehetett, így a fixpont meghatározásához elegendő volt három állomás is. A geometriából ismert, hogy azon pontok, amelyeknek két adott ponttól mért távolságkülönbsége állandó, hiperbolát alkotnak. Ebben az esetben tehát a helyzetvonal: hiperbola. A hiperbola fókuszai maguk a kijelölt pontok lesznek. Két-két adópár mérésével két hiperbolát határozhattak meg, amelyek metszéspontja a hajó keresett helyzetpontja volt.
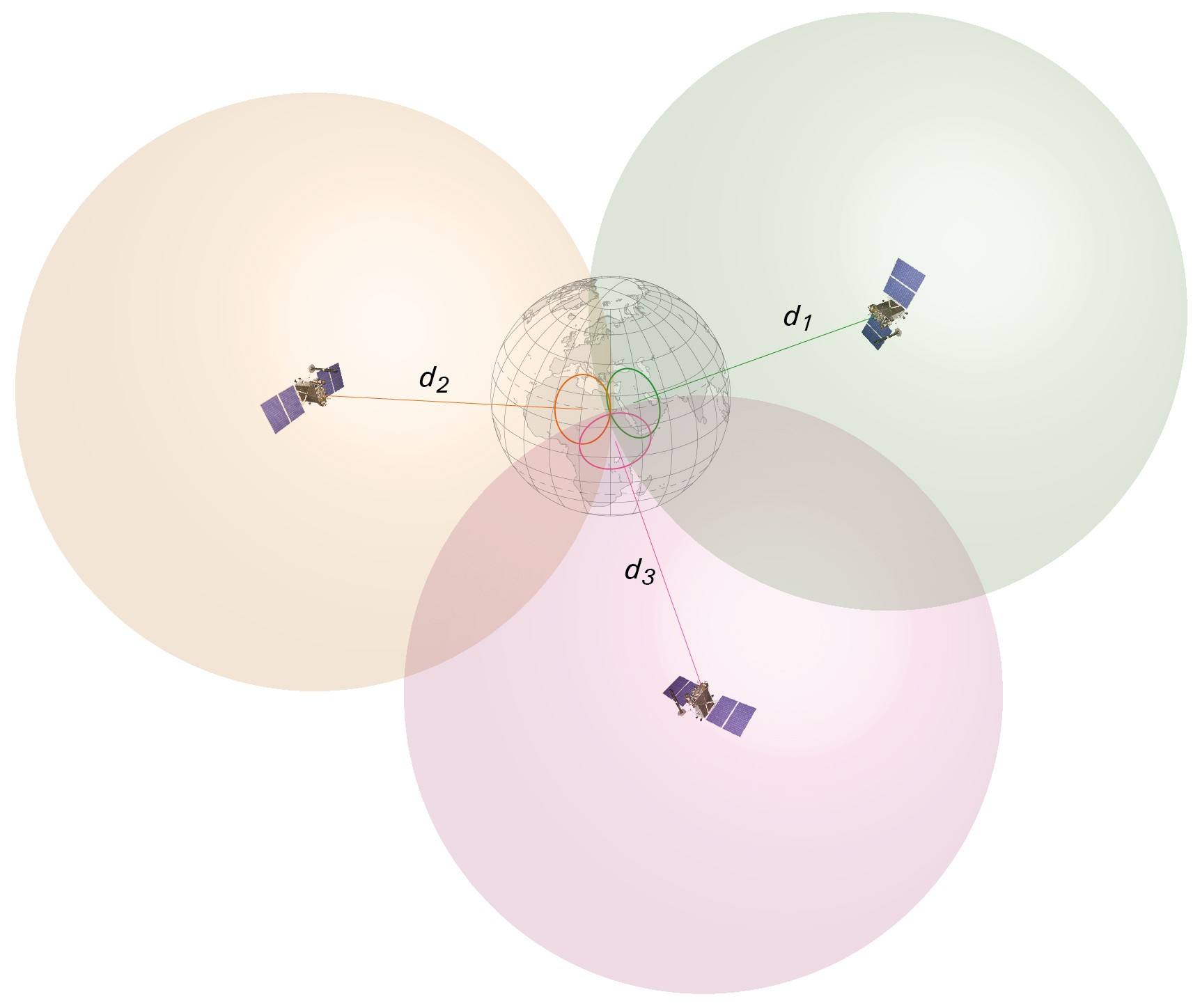
MŰHOLDAS NAVIGÁCIÓ
A műholdas helymeghatározás alapja, hogy a műholdak által küldött jel futási idejét igen pontos, szinkronizált órákkal megmérjük. Ebből kiszámítható a műhold vevőtől mért távolsága, melyet egy képzeletbeli térbeli gömb sugarának tekintünk. Két távolságméréssel képzett gömbök metszésvonala egy kört ad, míg három gömb két pontban metszi egymást. Az egyik pont a vevő térbeli pozíciója. A három gömb a földfelszínnel alkotott (közel) kör alakú metszésvonalainak (helyzetvonalainak) találkozási pontjában van a földfelszínen lévő vevő pozíciója.
Mindezekről részletesebben a Jachtnavigátor II. 4. rész 4. fejezetben olvashatsz.